



O redutor robótico RV PEEK é um dispositivo de redução de alta precisão que aplica materiais compósitos de PEEK (Poliéter Éter Cetona) à estrutura de transmissão RV (Vetor Rotativo), integrando a alta rigidez dos redutores RV com a vantagem de leveza dos materiais PEEK. A seguir, uma introdução aos aspectos de inovação estrutural, propriedades dos materiais, indicadores de desempenho e cenários de aplicação:
I. Inovação Estrutural
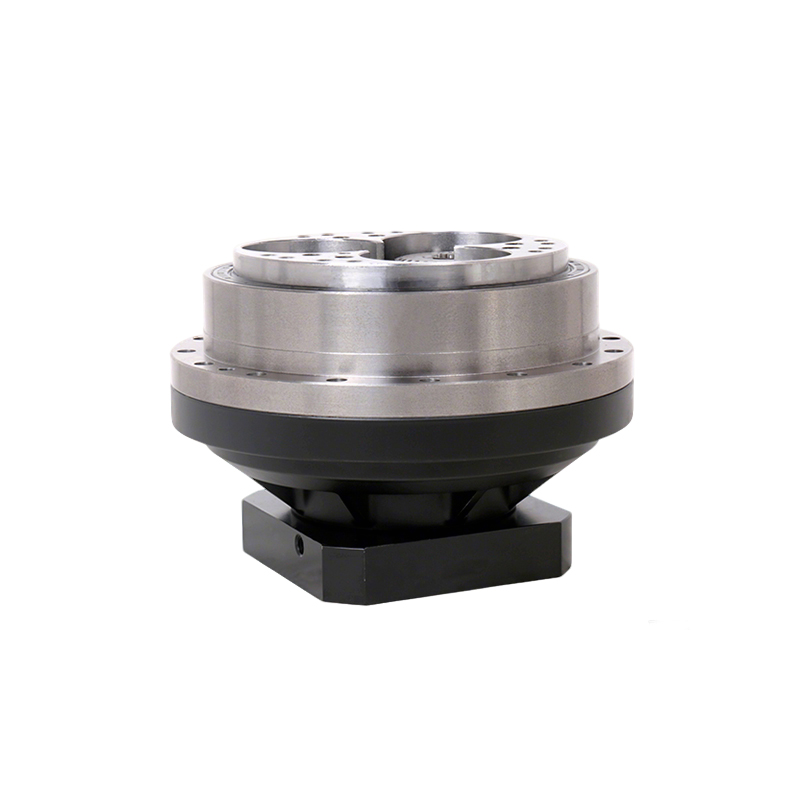
Adota uma estrutura de redução de dois estágios: o primeiro estágio é a redução por engrenagem planetária (engrenagem solar + 3 engrenagens planetárias) e o segundo estágio é a redução por cata-vento cicloidal (2 rodas cicloidais com defasagem de 180°). Nos componentes principais da transmissão, as rodas cicloidais são feitas de moldagem por injeção de PEEK com 30% de fibra de carbono, os pinos dos dentes dos pinos são estruturas compostas de PEEK-metal (camada externa resistente ao desgaste de PEEK + eixo central de aço) e a caixa de mancal do eixo excêntrico integra buchas autolubrificantes de PEEK, permitindo uma operação de longo prazo sem óleo. A estrutura geral é otimizada por meio da topologia de elementos finitos, reduzindo o número de peças em 25% em comparação com os redutores RV de aço tradicionais.

II. Propriedades dos materiais
Vantagem na relação resistência-peso: A resistência à tração da roda cicloidal de PEEK atinge 180 MPa, com uma densidade de apenas 1,45 g/cm³, reduzindo o peso em 55% em comparação com as rodas cicloidais de aço. Ao mesmo tempo, a resistência à flexão da raiz do dente é aumentada em 40% devido ao design orientado pela fibra de carbono.
Desempenho dinâmico: O coeficiente de amortecimento do material é de 0,02 (0,001 para aço), reduzindo o ruído de transmissão em 15-20 dB e aumentando a frequência de ressonância para mais de 3000 Hz.
Adaptabilidade ambiental: mantém propriedades mecânicas estáveis dentro da faixa de temperatura de -60°C a 220°C, é resistente à erosão do óleo hidráulico e do óleo da engrenagem e atende aos requisitos de nível de proteção IP67.

III. Indicadores Essenciais de Desempenho
Precisão de transmissão: folga ≤ 15 segundos de arco, precisão de posicionamento de repetição ± 5 segundos de arco, flutuação de torque de partida sem carga ≤ 3%.
Capacidade de carga: Torque de saída nominal 80-300 N·m (modelos correspondentes RV-40 a RV-110), fator de sobrecarga de curto prazo 2,5 vezes.
Eficiência e vida útil: eficiência de transmissão de 94% a 96% (a 2.000 rpm de entrada), MTBF (tempo médio entre falhas) > 20.000 horas (sob condições nominais).
IV. Cenários típicos de aplicação
Robôs humanoides: peças de grande carga, como articulações de rotação da cintura e articulações do joelho, como a unidade de acionamento da articulação do quadril do Tesla Optimus (que exigem redutores de classe 200N・m).
Robôs industriais: eixos J2/J3 de braços mecânicos de seis eixos, substituindo redutores harmônicos tradicionais para atingir maior rigidez.
Equipamentos de ponta: robôs de manuseio de wafers semicondutores, efetores terminais de robôs cirúrgicos, que precisam atender simultaneamente aos requisitos de precisão de posicionamento em nível de mícron e leveza.











